


It seems every other week, scientists and engineers try to come up with a better version of a robot claw machine – they’ve even tried using dead spiders. The latest offering in the wild world of robotics has seen researchers from the Harvard John A. Paulson School of Engineering and Applied Sciences (SEAS) develop a new robot, and this one has tentacles.
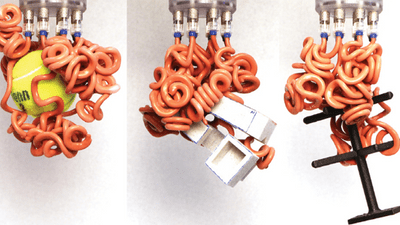
The rest of this article is behind a paywall. Please sign in or subscribe to access the full content.Picking up soft objects is notoriously difficult for robots, as it usually requires feedback loops and lots of forward planning. Inspired by nature, the team has made a new type of soft robotic gripper that features twelve soft tentacles to entangle the objects. Researchers call them fluidically actuated slender hollow elastomeric filaments.
Based on how a jellyfish might capture prey, the collection of tentacles is stronger than one tentacle alone. This allows the robot to wrap around and then lift fragile objects without breaking them. The researchers call this process active collective entanglement.
"By taking advantage of the natural compliance of soft robotics and enhancing it with a compliant structure, we designed a gripper that is greater than the sum of its parts and a grasping strategy that can adapt to a range of complex objects with minimal planning and perception," said Kaitlyn Becker, former graduate student and postdoctoral fellow at SEAS and first author of the study, in a statement.
But how does it work?
While previous robotic grippers have used complex feedback loops, this one works by using simple inflation and pneumatics. The tentacles, which are nearly a foot long each (30 centimeters), are hollow tubes.
Eight of the tentacles are arranged on a 50-millimeter (1.9-inch) diameter circle with the remaining four on a 25-millimeter (0.98-inch) diameter concentric circle. One side of each tube is thicker than the other, which means they curl when the tube is pressurized.
While collectively the hold is strong enough to lift the object, the individual tubes have a weak contact, so won’t damage the fragile surface of the item. Not all of the twelve tentacles are involved in every grab, but the team says more could be added to increase the chances of a successful pickup and to entangle with each other.
The paper is published in PNAS.


