The rolling power of pill bugs and grip strength of chitons have landed them an unexpected role in robotics, as scientists working on biohybrid technologies have invented a robot arm with living grippers. The creators say that the method doesn’t harm the animals and that once they’ve done their grabbing, they can simply scuttle back into nature.
The novel technology is made up of a mechanical arm that is fitted with a live animal as an end effector, which is the technical name for the bit at the end of a robot arm that interacts with the environment. It’s basically the hand that the humans crewing robots want to control, but what if it had a mind of its own? Researchers at Tohoku University in Japan decided to flip this idea on its head by replacing end effectors with whole living organisms.
It's a field of robotics that can be divided into two key areas: biomimetics, which takes inspiration from living things, and biorobotics, where the mechanisms actually interact with living things. Historically the former has included using taxidermy birds to make realistic drones, while remarkable examples of the latter feature a search-and-rescue cyborg cockroach, and “necrobotic” grabbers made out of dead spiders.
Looking to biotic organisms for inspiration when it comes to robotics makes sense, as animals big to microscopic have evolved over millions of years to be the best at what they do, effectively giving researchers the opportunity to stand on the shoulders of countless trial and error experiments. This is why even the humble pill bug has a magnitude of applications, with some having suggested that similarly-shaped bots could even help us explore lava tubes on the Moon.
While many have ventured into biohybrid bots, this latest study is unique in the wholeness of its constituent parts.
“To our knowledge, there is no prior example of whole living organisms being used as end effectors for robotic arms,” wrote the authors in their preprint, which is yet to be peer-reviewed. “This approach departs from traditional methodologies by leveraging the structures and movements of specific body parts without disconnecting them from the organism, all the while preserving the life and integrity of the creature.”
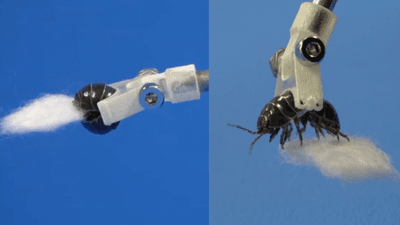
In their research, they explored two whole living organisms as end effectors, monopolizing on the reflexive closure of pill bugs and the suction power of chitons, a type of marine mollusk. While these two approaches to clasping were thought to be effective, it’s a concept they say could apply to many other species, mentioning slugs and leeches as examples.
“Just as we have been making use of sled dogs and horses for transportation and carrier pigeons to convey postage for thousands of years,” they continued, “the concept proposed here is yet another way of harnessing the unique functions of biological organisms, and is one step further towards a truly radical integration of robots and their environment.”
Furthermore, the researchers suggest that the novel approach could be useful in settings where the end effector participants are a natural part of the environment.
“Let’s imagine a robot stuck at the bottom of the ocean that needs to improvise a gripper function to complete a task,” molecular biologist at Yamagata University Josephine Galipon told PopSci. “Instead of building a gripper from the ground up, it could borrow help from a chiton, and as a reward, the chiton would be transported to a new place with possibly more food.”
Both the pill bug and chiton end effectors proved to be capable of grasping things, but there were some hold-ups in the timing of the reflexive reaction (don’t work with children, pill bugs, or chitons, as they say). The chiton also had issues letting go, and actually held on even tighter when stimulated to release. The researchers hypothesize there may be a way to encourage capture and release, but that this should be done by focusing on the least invasive approaches available.
As well as thinking of ideas to improve the tech, they’ve a few suggestions for alternative organisms that could work in tandem with robotics to achieve novel manipulation techniques, both big and small.
“Organisms that adhere to their environment, such as the Japanese spineless mussel or the snail are also useful for sticking to porous objects and objects with rough surfaces. At the microscopic scale, if the distance between the flagella of bacteria can be artificially controlled, it would be possible to switch between swimming and grasping modes to utilize bacteria as micro-handling devices.”
Ethics are of course a consideration when talking about any living thing, but the paper concludes that none of its end effectors were harmed in the process of their research.
“The pill bug was released back to nature, and the chiton was well active and alive in its aquarium at the time this paper was written, which is exactly six weeks after this experiment, at which point the glued part naturally came off.”
Rest easy, you grippy chiton you.
The preprint study, which is a preliminary version of a scientific manuscript that has not yet undergone peer review, has been posted to the preprint server arXiv.
[H/T: New Scientist]