

The somewhat unexpected melding of moth and machine has begun. Roboticists from the Research Center for Advanced Science and Technology at the University of Tokyo have developed a miniature scent-controlled robot that is accurately piloted by a silkworm moth.
Their study is published in the Journal of Visualized Experiments, where you can watch the full 9-minute breakdown of the experiment in a video.
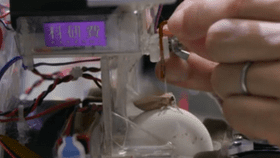
The robotic vehicle features a cockpit where the silkworm moth is tethered and placed on top of an air-supported floating ball. Attracted by the scent of a female sex pheromone, it attempts to follow the direction of the odor. As the moth walks on the floating globe, it spins around like the tracking ball in a computer mouse. Optical sensors track the direction of this spin and the robot moves accordingly.
In an experiment to test out their new wheels, on average the robot-driving moths were able to reach a target just 2 seconds after moths that took the more conventional method of walking, according to Science Magazine.
So what’s the point of all this? Good question.
According to the study, the "capability to localize an odor source is necessary for insect survival and is expected to be applicable to artificial odor-tracking."
The scientists say the insect-controlled robot was designed to test out the understudied field of “robotic odor source localization.” If further developed, this technology could be used for robots to sniff out hazardous materials, illicit drugs, or explosives.
Aside from anything, it also serves as a rather cool example of how living organisms can be integrated into robotic systems. This isn’t the first time robots have taken orders from biological systems. Researchers have also toyed with the idea of using bacteria to control robots, in a similar fashion to the moth-mobile.